Arduino
Arduino El Salla Uygulaması
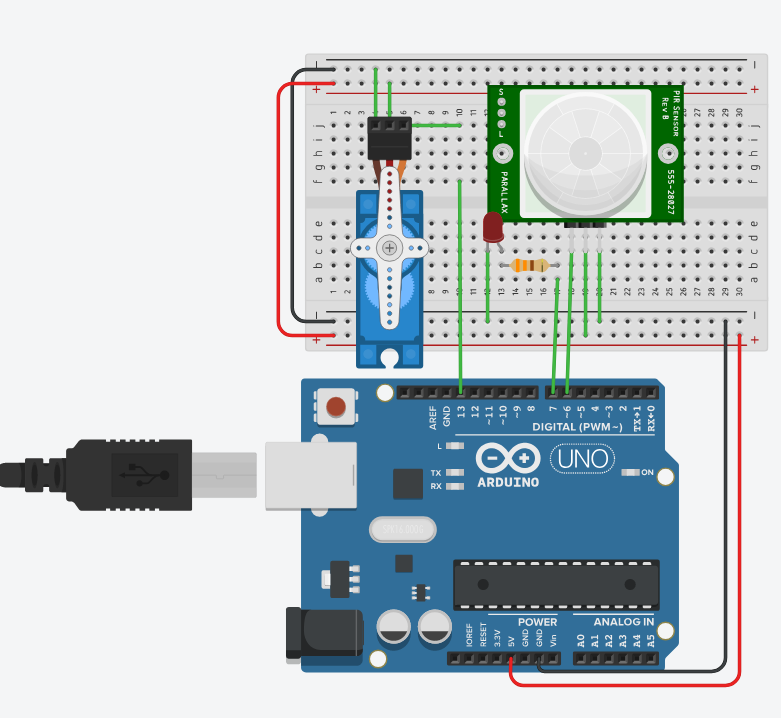
#include <Servo.h>
int pirPin=6;
int servoPin=13;
int hareket;
int led=7;
Servo motor;
void setup() {
motor.attach(servoPin);
pinMode(pirPin,INPUT);
pinMode(led,OUTPUT);
}
void loop() {
hareket=digitalRead(pirPin);
if(hareket==HIGH){
motor.write(150);
digitalWrite(led,HIGH);
delay(250);
motor.write(30);
delay(250);
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(90);
}
else{
motor.write(90);
digitalWrite(led,LOW);
}
}